The controller must supply only the result of the comparison between the preset value of the electromagnetic torque te* and the "real" one te, determined following a calculus that uses the measured values of the stator currents and the actual topology of the inverter.
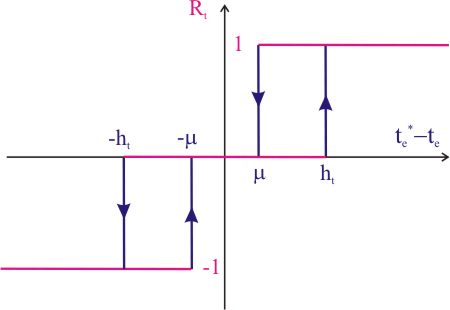
Due to the fact that the output of the controller must have a tertiary form (torque "greater"/"constant"/"smaller"), it results that it will have a double hysterezis, the commutation points being:
 .
.
Within the commutations limits, the controller keeps the actual state (figure 3).