
Similar to the modulus of the stator flux, it is not enough only to compare the preset value (te*) and the real one (te) of the electromagnetic torque developed by the motor, without considering a hysterezis.
The hysterezis limits the frequency of the changes of the controller's output and, consequently, the switching frequency of the inverter.
The value of the hysterezis and of the level m must be correlated with the commutation speed of the inverter's semiconductors. It can be as small as possible (ideally zero), as the semiconductors are faster.
The level m can take negative values also. In this case, the two hysterezis zones could be overlapped (figure 4).
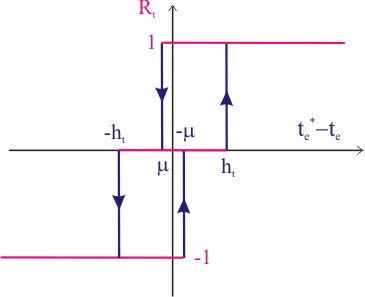
At the limit, m = -ht and -m = ht, the controller becoming with simple hysterezis, like the flux controller. In this case, the states 0 (KA = KB = KC = OFF) and 7 (KA = KB = KC = ON) will be not used anymore for generating the waveforms of the voltages.