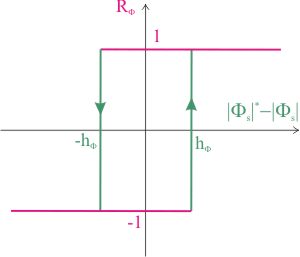
The controller must supply only the result of the comparison between the preset value of the modulus of the stator flux |Fs|* and the "real" one |Fs|, determined following a calculus that uses the measured values of the stator currents and the actual topology of the inverter.
It results that the output of the controller can have a binary form (all or nothing), with hysterezis:
 .
.
If
![]() ,
,
the controller keeps the actual state (figure 1).