
Comanda vectorială a maşinii asincrone
4. Aspecte ale implementării controlului vectorial
4.4 Strategia PWM vectorială (SVPWM) - Modularea impulsurilor în lăţime de tip vectorial
PWM vectorial (SVPWM - Space Vector Pulse Width Modulation) = o tehnică nouă de modulaţie optimală care permite minimizarea armonicilor curentului şi cuplului.
Elimină unele din inconvenientele menţionate.
Principiul: aproximarea tensiunii medii de referinţă Vs(kTe) pe timpul unei perioade de eşantionare Te prin vectorii de tensiune adiacenţi (Vi, Vi+1), V0 (notat şi VL ) şi V7 (notat si VH).
Vectorii pentru cele opt poziţii fixe se exprimă prin:
(16) |
Vs = VH = 0 (toate întrerupătoarele de sus sunt conductoare);
Vs = VL = 0 (toate întrerupătoarele de sus sunt blocate).
Secvenţele optimale din punct de vedere energetic ale întrerupatoarelor invertorului sunt cele care conduc la un minim de comutări (o singură tranzitie la trecerea dintr-o stare în alta).
Fiecărui sector îi corespund următoarele combinaţiile de comutaţii:1 : VL - V1 - V2 - VH - V2 - V1 - VL
2 : VL - V3 - V2 - VH - V2 - V3 - VL
3 : VL - V3 - V4 - VH - V4 - V3 - VL
4 : VL - V5 - V4 - VH - V4 - V5 - VL
5 : VL - V5 - V6 - VH - V6 - V5 - VL
6 : VL - V1 - V4 - VH - V4 - V1 - VL

Fig. 10 Calculul tensiunii de referinţă medii
Ti : timpul în care VS = Vi
Ti+1 : timpul în care VS = Vi+1
TL : timpul în care VS = VL
TH : timpul în care VS = VH
|
(17) |
|
(18) |
Deoarece VL = VH = 0,
(19) |
Comanda prin orientarea fluxului, cu cele două cai de reglare, a fluxului şi a vitezei, generează la fiecare perioadă de eşationare k două tensiuni: Vsd (k) şi Vsq (k).
Algoritmul SVPWM constăîn - Fig. 11:
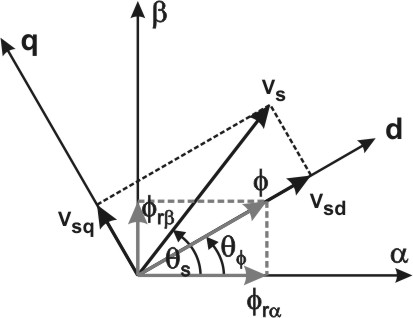
Fig. 11 Elementele vectorului de referinţă pentru SVPWM
|
(20) |
Se calculează impulsul de comandă după relaţiile:
|
(21) |
Undele SVPWM sunt simetrice faţă de mijlocul fiecărei perioade PWM - Fig. 12.
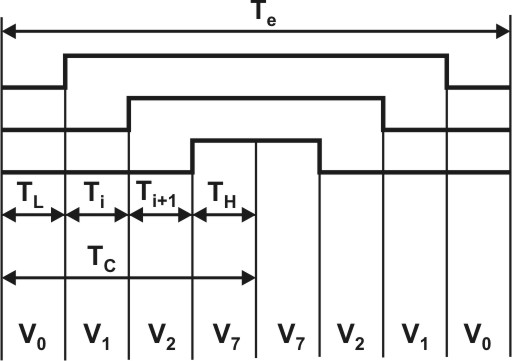
Fig. 12 Impulsurile modulate în lăţime pentru comanda vectorială
Exemplu : impulsurile PWM vectorial pentru sectorul 5 - Fig. 13

Fig. 13 Compararea metodelor de modulaţie
Secvenţa de comutaţie:
VL |
V5 |
V6 |
VH |
V6 |
V5 |
VL |
000 |
001 |
101 |
111 |
101 |
001 |
000 |
Modularea vectorială, contrar modulării sinusoidale, permite distribuirea într-un mod cât mai uniform posibil a zonelor de regim liber (TL et TH ) în tensiunile fază - nul.
Egalitatea TL = TH implică injectarea armonicii de ordin 3, a cărei amplitudine este 25% din tensiunea sinusoidală de referinţă. Adăugarea acestei armonici la referinţele sinusoidale reduce sensibil distorsiunea armonică a tensiunii de ieşire a invertorului. Pentru SVPWM, amplitudinea vectorului de referinţăa în regim staţionar este 2/3E,
dar, în general, locul său este situat în interiorul cercului de rază ![]() .
.
Tensiunea maximă de ieşire pentru SVPWM este ![]() (OM / ON), superioară celei pentru PWM sinusoidal. Deci sursa de c.c este mai bine utilizată.
(OM / ON), superioară celei pentru PWM sinusoidal. Deci sursa de c.c este mai bine utilizată.
