- Sistemul de control vectorial prin metoda indirectă este efectiv numai dacă valorile parametrilor motorului care intră în regulator sunt egale cu valorile reale.
- Pentru funcţionarea la flux rotoric constant, modificarea constantei de timp a motorului Tr conduce la deviaţia vitezei wrc:


se abate de la poziţia reală

care produce o deviere a unghiului cuplului

În consecinţă rezultă o descompunere incorectă a vectorului curentului statoric is în cele două componente isx şi isy (Fig. 4).

Figura 5. Orientarea incorectă a fluxului rotoric anticipat frc (Trc>Tr , wrc prea mic )
- Condiţia de decuplare a controlului fluxului şi cuplului nu se poate obţine, conducând la valori incorecte pentru fluxul rotoric fr şi componenta curentului isy la funcţionarea staţionară (pentru mc=const).
- În Fig. 5 se prezintă efectul modificării constantei de timp asupra cuplului şi fluxului rotoric obţinute pentru valorile normale ale comenzilor curenţilor isyc = isxN şi isxc = isxN (s-a omis efectul saturaţiei). Se observă de exemplu că dacă valoarea constantei de timp reale este mai mică decât cea comandată (Tr/Trc< 1) fluxul creşte faţă de valoarea lui corectă.
- Atât modificarea cuplului cât şi a fluxului depind puternic de valoarea isyN/isxN. Motoarele de putere mai mare sunt mult mai sensbile la modificarea constantei de timp (Tr/Trc) decât cele de putere mică.
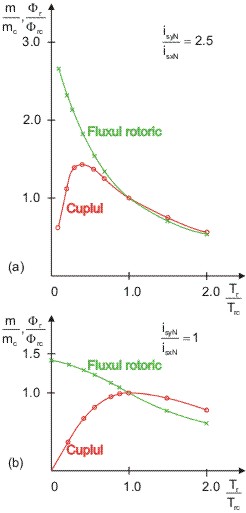
Figura 6. Efectul dezacordului parametrilor în regim staţionar:
(a) motoare de putere mare
(b) motoare de putere mică
