Schema bloc a sistemului este indicată în Fig.4
- Regulatorul generează curenţii de comandă ai statorului isxc,
isyc şi viteza wrc din comanda cuplului mc şi comanda fluxului rotoric frc.
- Componentele comenzilor curentului statoric isac şi isbc se obţine prin transformarea de coordonate xy®ab şi iAc, iBc, iCc prin conversia de fază ab®ABC.
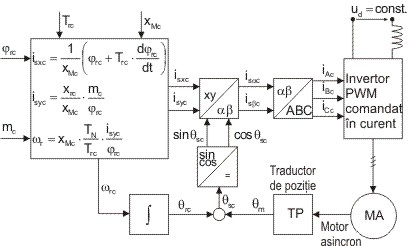
- Metoda indirectă de comandă vectorială a motorului asincron alimentat de la un invertor PWM comandat în curent este cel mai uşor de implementat din punct de vedere al procesării semnalelor.
