
Comanda vectorială a maşinii asincrone
4. Aspecte ale implementării controlului vectorial
4.3 Metode de modulare în durată
Se consideră structura standard de invertor - Fig.8
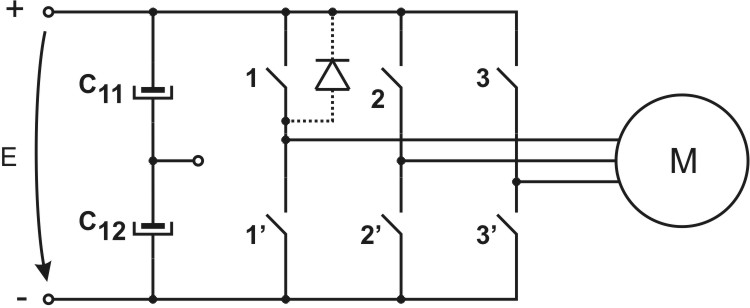
Fig. 8 Invertorul - structura si notatii circuit de putere
"O": punctul de nul fictiv al sursei de tensiune continuă.
Cele trei tensiuni în stea ale maşinii v1 , v2 , v3 formează vectorul Vs , definit prin:
|
(15) |
Ciclul de lucru al invertorului : 6 etape utile şi alte două "nule".
Vs se poate afla în opt poziţii fixe, corespunzătoare la 8 configuraţii ale întreruptoarelor de putere, codificate pe 3 biti.
Asocierea coduri binare - stări invertor - poziţii vector Vs (nu este critică) - Fig. 9:
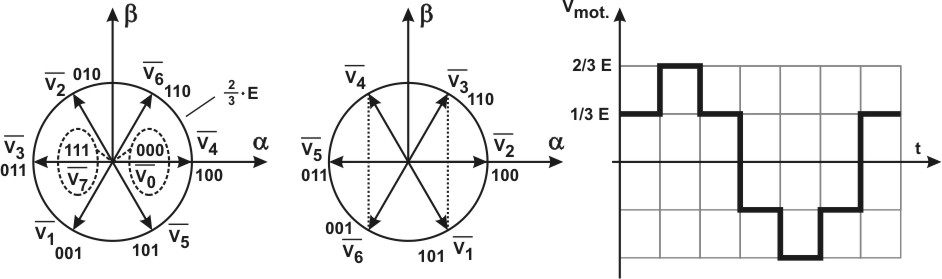
Codul binar 1 / 0: închiderea / deschiderea întrerupatorului din semipuntea superioară (vezi Fig. 8).
A doua notaţie: urmărind proiecţiile pe axa a ale vectorului Vi , regăsim forma de undă pentru tensiunea furnizată pentru o perioadă (a fundamentalei) la comanda cu undă plină - fără modulare.
Invertorul cu undă plină are două inconventiente:
Metoda PWM
fc = frecvenţa de tăiere; fs = frecvenţa de ieşire.
Creşterea numărului de impulsuri pe o perioadă a maşinii, permite variaţia valorii tensiunii fundamentale de iesire şi mărirea ordinului primei armonici.
PWM asincronă: frecvenţa de eşantionare = constantă® un raport fc / fs = p ( oarecare).
Pentru maşinile de putere mică (invertoare cu tranzistoare).
Frecvenţa de comutare > 2 kHz.
Pentru maşinile de mare putere:
fc = 250 Hz. 1KHz
fs = 50 . 100 Hz conţinut armonic: ridicat
PWM sincronă:
fc şi fs : corelate. Pentru fs = 0.70 Hz, fc: 600.1000 Hz.
Modularea sincronă evită subarmonicile (în mod particular în circuit deschis după o lege U/f = ct.), care produc rezonanţe şi tensiuni în lanţul cinematic.
Inconveniente: