
Comanda vectorială a maşinii asincrone
3.4 Principiul şi schema de bază pentru controlul vectorial
Strategia de comandă cu orientare dupa câmp constă în realizarea unui decuplaj între cele două variabile principale ale maşinii asincrone: cuplul şi fluxul.
Interdependenţa dintre aceste mărimi este dată de :
|
(8) |
Pentru comanda vectorială (sau cu orientare după flux), axa d este orientată pe rezultanta fluxului rotoric:
(9) |
Daca ![]() este menţinut constant, în sistemul de referinţă ataşat de fluxul rotoric:
este menţinut constant, în sistemul de referinţă ataşat de fluxul rotoric:
(10) |
Această relaţie arată o similitudine remarcabilă cu maşina de curent continuu. Se poate deci controla cuplul prin intermediul componentei q a vectorului curent statoric - denumită de aceea, în mod natural, componenta "cuplu".
Relaţiile:
|
(11) |
arată că :
Fără cuplajul (combinarea) acţiunilor Isd şi Isd ® se regăseşte configuraţia de motor de c.c.
Deci controlul vectorial utilizează un model transformat al maşinii astfel încât să se menţină ortoganalitatea flux-curent activ. Atunci cuplul electromagnetic este dat de o expresie scalară, la valoarea sa maximă.
Funcţiile esenţiale pe care trebuie să le îndeplinească o structură de comandă vectorială pentru a controla cuplul unei maşini asincrone:
Următoarea schemă funcţională evidenţiază elemente de bază pentru comanda vectorială.
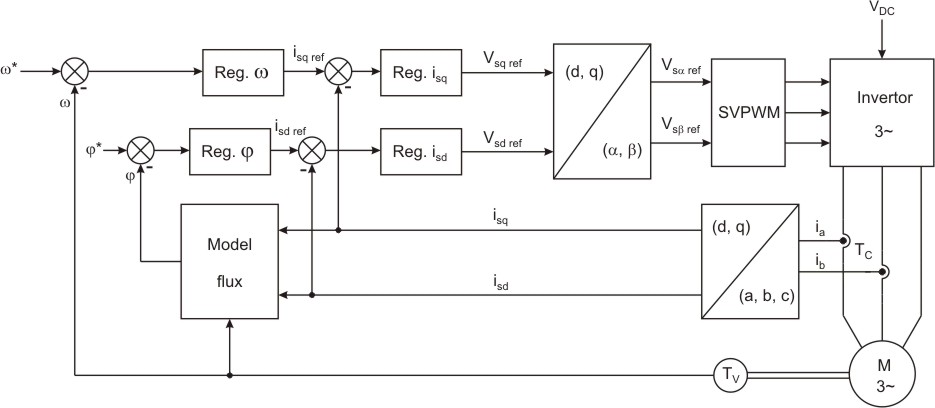
Fig. 4 Schema bloc pentru controlul vectorial - ilustrarea principiului
Curenţii statorici ia şi ib, obţinuţi de la traductoarele de curent TC, activează blocul de transformare Clarke - Park.
Schimbând referinţa fluxului, se poate particulariza structura pentru comanda vectorială a motoarelor asincrone sau a celor sincrone.
Ieşirile regulatoarelor pentru curenţi dau referinţele pentru componentele (d, q) ale tensiunilor statorice.
Aceste mărimi dau pentru transformarea Park inversă tensiunile Vsa ref şi Vsß ref care fac să functioneze blocul modulator PWM.
Acesta trimite impulsurile de comandă către dispozitivele de comutaţie din structura invertorului.Cunoaşterea amplitudinii şi fazei fluxului: esenţială!
După metodele utilizate pentru a le obţine, există variantele:
® bucla de reglare pentru componenta 'd' a curentului este de fapt bucla fluxului (controlat indirect).
Metodele care fac apel la calculul fluxului : metode de estimare a fluxului sau cu observator de flux.
Bucla explicită a fluxului: se poate adăuga un bloc suplimentar pentru prelucrarea acestuia: corector de flux.
! ! ! Important:
Structura / principiul prezentat realizează ceea ce este cunoscut sub numele de:
«control vectorial după flux rotoric»
= strategia de comandă vectorială cea mai utilizată.
Modelul maşinii asincrone (inclusiv expresia cuplului electromagnetic) este tratabilă în sisteme de referinţă diferite:
Deci, se pot implementa comenzi vectoriale cu orientare după:
Comanda este realizată în sistemul de referinţă solidar cu fluxul respectiv, curenţii statorici fiind obţinuţi în sistemul asociat.
Într-un astfel de sistem, componentele curentului statoric sunt întotdeauna ortogonale şi similare curentului de excitaţie şi curentului din indusul motorului de c.c.
Comanda după fluxul statoric: dificultatea măsurării tensiunilor statorice foarte distorsionate în cazul invertoarelor PWM.
Deşi măsurătorile primare se referă la curenţii (ia, ib, ic), comanda finală a invertorului de tensiune revine unor bucle de reglare pentru componente de tensiune.
Noile tendinţe pentru soluţiile de control vectorial: