
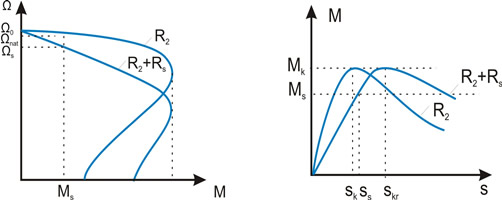
Pentru determinarea rezistenţei suplimentare R2S se particularizează ecuaţia caracteristicii mecanice reostatice pentru punctul de funcţionare impus (MS , ΩS ).
Se calculează alunecarea
![]()
şi se particularizează ecuaţia caracteristicii statice
![]()
De aici
Din proprietăţile caracteristicilor statice se obţine rezistenţa suplimentară
![]()
Deşi metoda prezintă o serie de dezavantaje, dintre care cel mai important este legat de pierderile de energie pe rezistenţa suplimentară, ea se utilizeaza în multe aplicaţii pentru motoare de putere mare alimentate la 6 kV, dar şi pentru motoare de joasă tesiune. Unele dezavantaje clasice, legate de dimensiunile de gabarit, fiabilitatea redusă datorită conexiunilor multiple, dificultăţile de introducere într-un sistem automat, au fost diminuate sau eliminate prin soluţii tehnologice moderne, cum ar fi „reostatul electronic”.
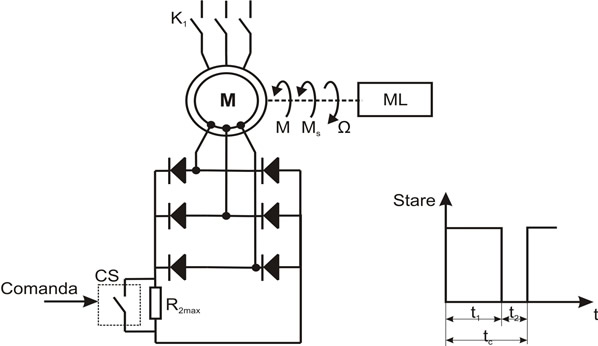
Contactorul static este comandat cu factor de semnal variabil
![]()
iar rezistenţa medie
R2med. = ( 1- a ) R2max.
Rezistenţa R2max se calculează pentru a asigura pornirea, iar factorul de semnal a pentru reglarea vitezei din condiţia:
R2S = ( 1- a ) R2max.
Rezultă
![]()