
Se obţin în cazul când valoarea efectivă a tensiunii de alimentare este diferită de valoarea nominală a acesteia. Pentru a nu se suprasatura motorul electric, în practică, se utilizează numai caracteristici mecanice corespunzătoare la valori ale tensiunii mai mici decât valoarea nominală, respectiv: U < UN, f = f N , R2' = R20' .
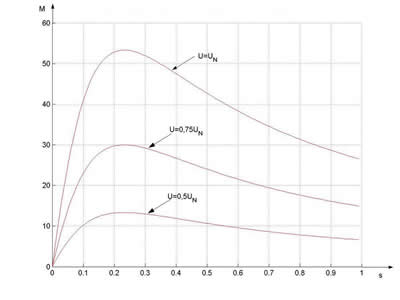
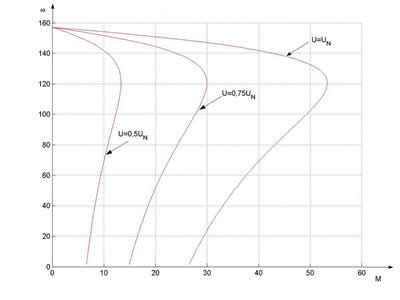
Din expresiile cuplului critic şi alunecării critice (7) şi (8) se constată că alunecarea critică rămâne la valoarea nominală, iar cuplul critic se reduce odată cu scăderea tensiunii (figura 3).
 |
 |