
În cazul comenzii directe a cuplului, nu există o strategie predefinită de modulaţie în durată. Topologia invertorului este determinată, de fiecare dată, în funcţie de tendinţele necesare de evoluţie ale amplitudinii fluxului şi ale cuplului electromagnetic.
Algoritmul de determinare a topologiei invertorului, presupune parcurgerea, în fiecare interval de modulaţie în durată, a etapelor următoare:
ţinând cont de topologia actuală a invertorului şi de valoarea instantanee măsurată a tensiunii din circuitul intermediar U, se determină valorile instantanee ale componentelor usa şi usb ale tensiunilor statorice
 .
.
Valorile stărilor sA,B,C se consideră "1" pentru KA,B,C = ON şi "-1" pentru KA,B,C = OFF.
pe baza valorilor instantanee măsurate ale curenţilor de fază isA, isB, isC, se determină valorile instantanee ale componentelor isa şi isb ale curenţilor statorici
 .
.
![]() ,
,
![]()
şi apoi modulul fluxului statoric
şi cuplul electromagnetic dezvoltat de motor
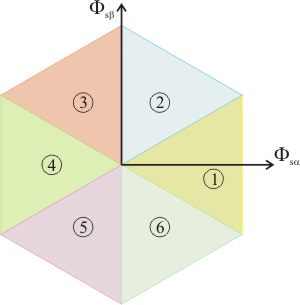
în urma comparării valorilor determinate ale modulului fluxului statoric şi cuplului electromagnetic cu valorile prescrise, se decide care este tensiunea necesară şi implicit, următoarea topologie a invertorului (figura 5).
Figura 5
Existând două topologii pentru care se obţine fazorul nul (starea 0: KA = KB = KC = OFF şi starea 7: KA = KB = KC = ON), alegerea uneia dintre ele depinde de starea actuală a invertorului, astfel încât trecerea în starea nulă să se realizeze comandând comutaţia a cât mai puţine contacte.
De notat faptul că etapele algoritmului prezentat trebuiesc parcurse în fiecare perioadă de eşantionare a curenţilor statorici, aceasta fiind chiar durata minimă a unui puls al tensiunii modulate în durată ce alimentează motorul. Rezultă deci, necesitatea unui sistem de comandă peformant, astfel încât să se poată obţine o frecvenţă de comutaţie suficient de ridicată.