
In Direct Torque Control, there is not a pre-defined pulse width modulation (PWM) strategy. The topology of the inverter is determined, each time, depending on the necessary tendencies for the evolution of the flux amplitude and electromagnetic torque.
To determine the inverter's topology, on each modulation period, the following algorithm must be followed:
taking into account the actual inverter topology and the instantaneous, measured value of the DC voltage U, the instantaneous values of the usa and usb stator voltages are computed
 .
.
The values of the states sA,B,C must be considered"1" for KA,B,C = ON and "-1" for KA,B,C = OFF.
based on the instantaneous measured values of the phases currents isA, isB, isC, the instantaneous values of the isa and isb components of the stator currents
 .
.
![]() ,
,
![]() ,
,
then the modulus of the stator flux
and the developed electromagnetic torque
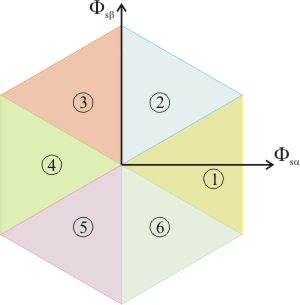
and the results of the comparisons between the actual values of the modulus of the flux and electromagnetic torque with the corresponding preset values, a decision is performed on the necessary voltage and consequently, on the next topology of the inverter (figure 5).
Figure 5
There are two possible topologies that correspond to the null phasor (state 0: KA = KB = KC = OFF and state 7: KA = KB = KC = ON). The choose of one of them, depends on the actual state of the inverter so the null state to be achieved with minimum commutations of the switches.
It is important to note that the steps of the presented algorithm must be fulfilled on each sampling period of the stator currents, which is also the minimum duration of a pulse within the pulse width modulated voltage that supplies the motor. It results that it is imperatively to have a high performance control system, capable to sustain a higher enough switching frequency.