According to the operation principle of the asynchronous machine, the developed torque is greater when the slip
![]()
is greater, respectively, the difference between the speed of the rotating field w0 and the mechanical speed of the rotor wr, is greater.
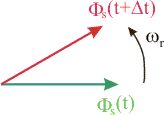
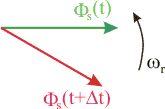
The Direct Torque Control consists, as principle, in controlling the advancement speed of the stator flux phasor (which is right the speed of the rotating field w0), respectively the next position of the flux, by knowing the actual one, depending on the necessary torque that the motor has to develop.
There are three possible situations:
Figure 1
In the same time, the value of the flux must be kept constant (for a certain operation regime). This means that the point of the flux phasor must describe a circle, having the radius equal to the necessary value of the flux (figure 2).
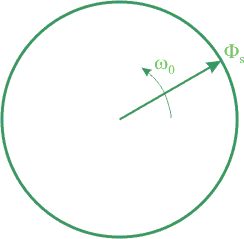
The stator flux phasor will travel this circle with variable speed, depending on the demanded torque.